If you have an internet-facing server, and that despite applying all the patches, securing everything, you want to keep an eye on your server activity and you want to be notified when someone is logging-in with SSH, here is a small and efficient trick !
The idea is to call a script every time an SSH session is opened. Within your script, you can decide what kind of notification you want: mail, telegram, push notification (https://docs.ntfy.sh/ is a good option) …
Step 1 – edit /etc/pam.d/sshd
At the end of the PAM configuration file, add the following line:
# Notify at connection
session optional pam_exec.so /data/admin/scripts/notify_on_ssh.sh
At every SSH connection, PAM will call your script, and pass some environment variables. be sure that your script can be called by the user running SSH. According to the documentation, PAM_EXEC will “Per default pam_exec.so will execute the external command with the real user ID of the calling process. Specifying this option means the command is run with the effective user ID.”
Step 2 – create your notification script
As per the documentation, the script will be called for all events: successful and non-successful ! If you want to filter on success events only, use the environment variable PAM_TYPE.
I do personally use simple mail notifications for this purpose:
#!/bin/bash
if [ "${PAM_TYPE}" != "open_session" ]; then
exit
fi
STMP="mail.xxx.com"
FROM="srv01@xxx.com"
TO="xxx@gmail.com"
SUBJECT="SSH Alert"
CONTENT="A User has logged in.\n\nUser: ${PAM_USER}\nOrigin: ${PAM_RHOST}"
echo -e "To: ${TO}\nFrom: ${FROM}\nSubject: ${SUBJECT}\n${CONTENT}" | ssmtp ${TO}
Recently, one of my EdgeRouter – an ER6P – got bricked, without any reason. It was working fine and all of a sudden stopped working.
Using the serial console, the router was in a bootloop – failing to start.
SPI stage 1 bootloader
SPI ID: c2:20:17:c2:20
header found at offset 0x2000
Image 1.2: address: 0xffffffffc0000000, header length: 192, data length: 359416
Validating data...
Corrupted bootloader
Could not start next bootloader
...
At this stage, it was not possible to interract with the router, nor to follow any guide from ubiquiti to fix by doing TFTP recovery etc.
In order to repair the router, it is important to understand its architecture. The architecture I’m going to describe is valid for Cavium chip based devices, so at least ER6P, ER12, and probably ER4.
The router is composed of a SOC, the Cavium and a 4GB flash memory which contains the firmware. The SOC is not able to boot on a flash memory, as it requires some drivers, and a piece of software, that is not natively included in the SOC. For this reason, there is an additional memory composant: SPI flash. SPI – for serial peripheral interface – is slower than parallel flashes, but is a simple protocol that is supported by the SOC.
The role of this SPI flash (which is small – 64 mbits) is just to host the bootloaders. Yes, with a final “S”, because it is a multi-stage boot ! Another role of this SPI flash is to emulate an eeprom to store some settings, such as the serial number of the router, its MAC addresses…
The SPI flash is splitted into 3 partitions, and some free/unused space.
Here is the layout of this SPI memory:
boot0 and boot1 are not a failover that could be used in case of faulty upgrade or so – as it is sometimes seen, but as 2 levels of boot. The router first boots the boot0, then the boot1. Interestingly, both bootloaders seems to rely on UBoot, but the first one has far less modules/features integrated. For example, if boot1 is corrupted, you can obtain a shell in boot0, but it will not come with tftp server/clients compiled in etc.
In my case, both boot0 and boot1 got corrupted ! As such, I did not get any console access to the router, leaving me with 1 single remaining option: the hard way (“try harder”).
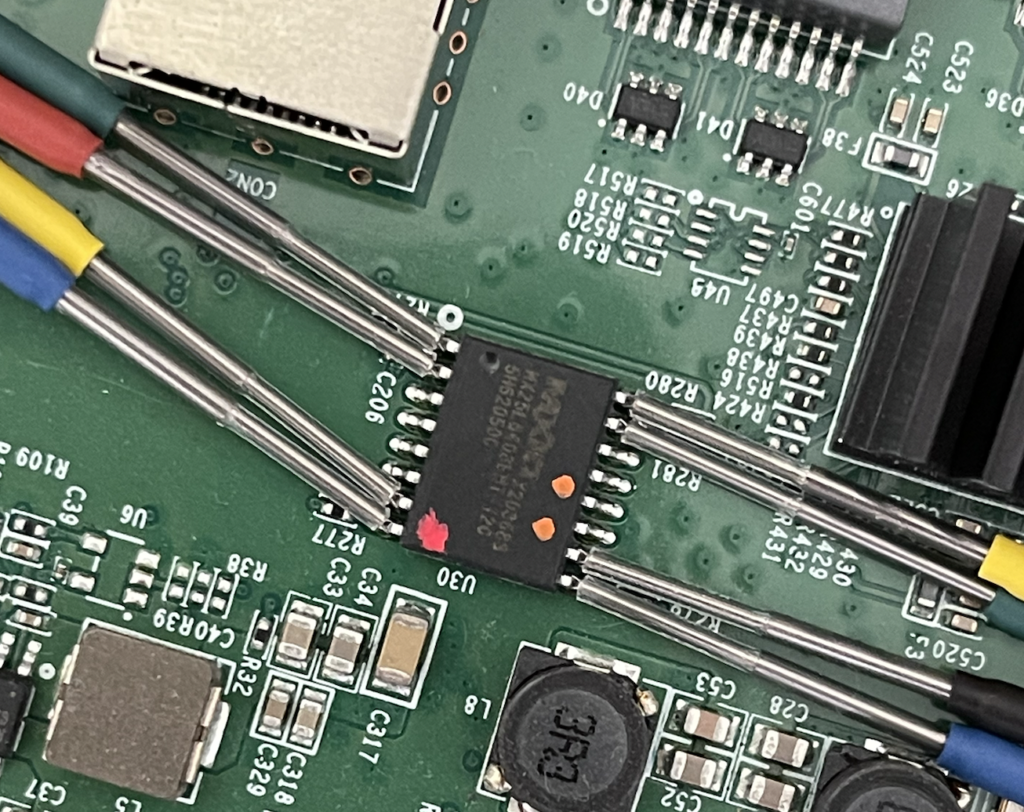
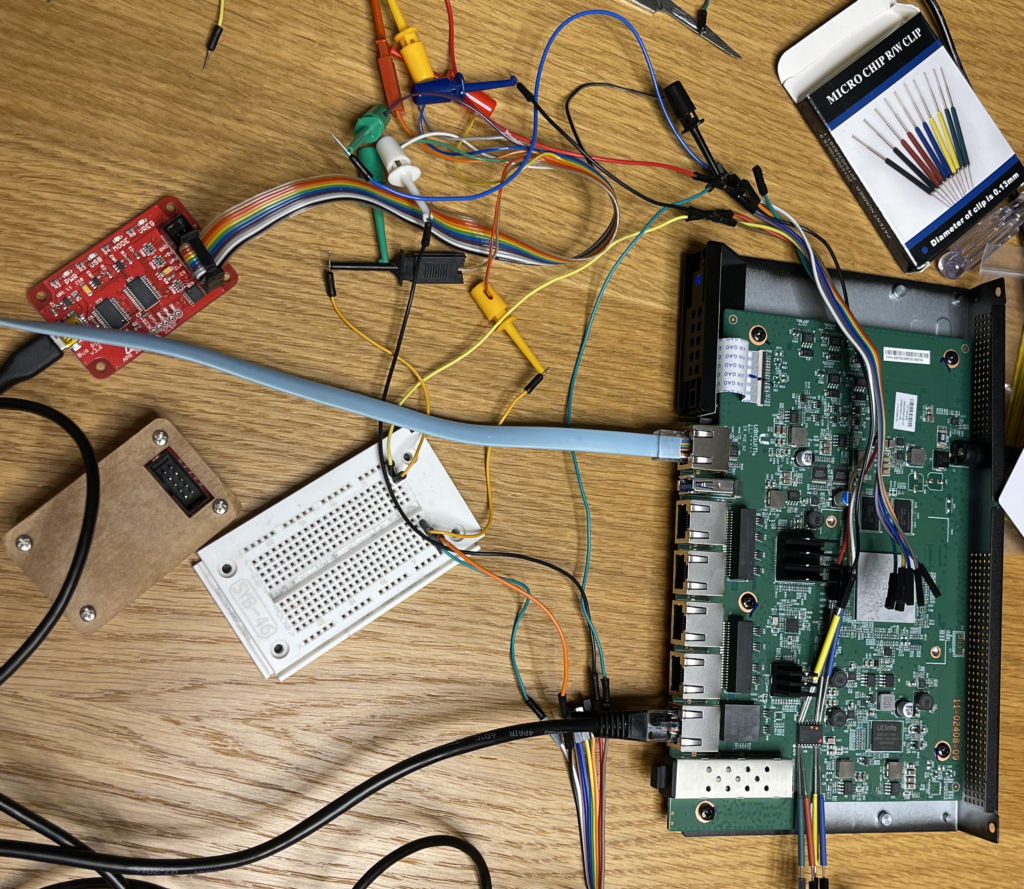
The hard way – in my case – was pretty simple: accessing the SPI flash in order to dump & flash it. I used my old good BusPirate friend, with Flashrom. Luckily, I did not have to unsolder the chip from the board to get it working.
I recommend using precision clamps / micro clamps that can be found on Aliexpress for example for few bucks.
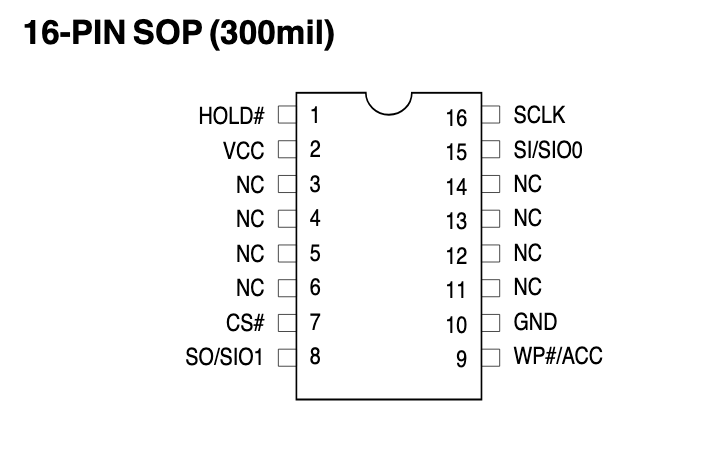
After having read carefuly the SPI datasheet (mx25l6405d), the pinout is obtained and can be connected to the buspirate.
Now that the pinout is known, just connect the correct buspirate probes to the SPI flash.
As you have to entirely re-write the flash – the first thing to do before anything else is to backup its content. Even if the bootloader is corrupted, the EEPROM partition might still be OK.
The previous command backups the content of the SPI flash to a file named backup-spi.bin. Note that I specified the chip type, to use correct SPI function codes.
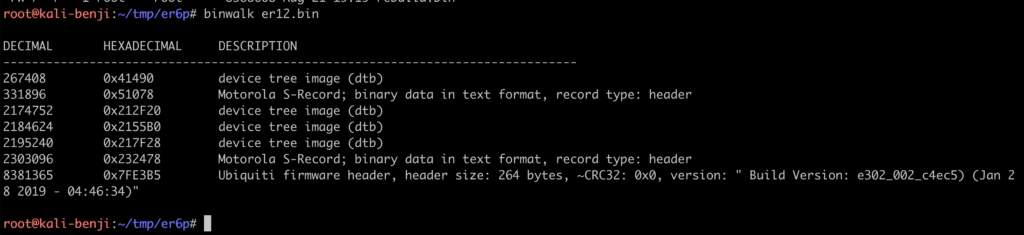
You now have the content of your flash. On a working router (the example below is with an ER12 SPI dump), it should looks like that:
As I said, there are 2 levels of bootloader, 0 and 1. If the bootloader 1 is corrupted, you can find its content in a firmware image from Ubiquiti, after extracting the squashfs image, in the root FS/etc/ubnt/bootloader.
The problem remains with bootloader 0: Ubiquiti does not provide its content – as the only way to re-flash it is to go with hardware probes.
At this stage, I only had an ER12 as a bootloader donor for my corrupted ER6P. As they both rely on Cavium SOC, I decided to give it a try to copy the ER12 bootloader to the ER6P. And it worked ! Well… the router booted, but it feeled like an ER12 instead of an ER6P. The ethernet ports were not correctly labelled, the LEDs were not correctly working etc. It was better than a brick, but not perfect. I still needed an ER6 dump.
I forgot to mention that to get a dump from a working router – there is an easier way than going with the buspirate : just use dd with /dev/boot0 / boot1 / eeprom.
Dumping from a working router:
dd if=/dev/boot0 of=/tmp/boot0.bin
Luckily, I found a working ER6 with a friend and could dump the bootloader 0. In case it could help other users – I decided to share them on github : https://github.com/blafois/edgerouter-spi-repair
Now, last step : before flashing back and bring back to life your router – you need to recompose the flash image. Remember the flash layout I presented earlier. You just need to keep your eeprom. Consider that your original dump is “backup-corrupted.bin”, and you get the dumps from “boot0.bin” and “boot1.bin”.
cat boot0.bin boot1.bin > repair-img.bin
# extract the eeprom from your backup - which resides in memory from 0040 0000 and 0041 0000
dd if=backup-corrupted.bin of=eeprom.bin bs=1 count=65536 skip=262144
cat eeprom.bin >> repair-img.bin
# now, just pad the image with some 0 (free space)
dd if=/dev/zero of=zeros.bin bs=1 count=4128768
cat zeros.bin >> repair-img.bin
# flash back image
flashrom -p buspirate_spi:dev=/dev/ttyUSB0 -w repair-img.bin -c MX25L6406E/MX25L6408E -V
At this stage, your router should be back to life 🙂
Edit: following comments from Cesar – here is the pinout for the Buspirate connection:
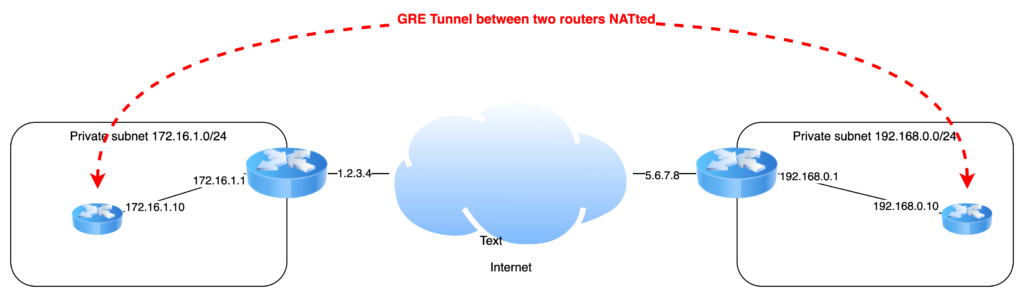
This article describes the configuration of a GRE tunnel between 2 routers that sit on a private network.
Use Case
What is the use case for such a “complex” setup ? The most obvious use case is the need/desire to establish a tunnel between 2 private networks, while the default gateways do not allow such technologies (such as ISP modem/routers).
Warning: GRE does not perform any kind of encryption. All data transmitted over the GRE tunnel will be in clear-text over the internet. As such, security/confidentiality is only handled by layer7 protocols (SSL, SSH…).
Design
For the sake of the example, the 2 private network addresses are 172.16.1.0/24 and 192.168.0.0/24.
This exercise is done using Vyos virtual appliances.
Setup NAT on the public internet routers / gateways
Sitting on a private network, the GRE endpoints must be reachable from the internet. This includes port forwarding and firewall opening.
Example on the LEFT gateway, using Ubiquiti router (Vyatta):
firewall {
name internet-to-lan {
default-action drop
rule 1 {
action accept
description GRE
destination {
address 172.16.1.10
}
protocol gre
}
}
}
...
service {
nat {
rule 1 {
description GRE
inbound-interface <public interface>
inside-address {
address 172.16.1.10
}
protocol gre
type destination
}
}
}
Setup GRE tunnel on a virtual appliance on a private network
interfaces {
ethernet eth0 {
address 172.16.1.10/24
description LAN
}
tunnel tun0 {
description GRE
address 10.0.0.1/30
encapsulation gre
/* The public IP address of the remote endpoint */
remote 5.6.7.8
/* The private IP address of the local router - same as eth0 */
source-address 172.16.1.10
}
}
The same configuration should be done on the remote side / router.
Warning: GRE is a stateless protocol, there is no session establishment, and as such, the status cannot be checked showing as CONNECTED or ERROR. You must just try to ping the remote side
Warning2: if you are using firewalling on the GRE router, you must ensure that proper rules are in place on interfaces tun0 to allow traffic you want to allow.
Now, you have a working GRE tunnel. If you want to route the traffic from the local network to both networks, you need to add static routes, both in the GRE router and in the default gateway on your network.
Lollipop Camera is designed to monitor babys. For details regarding the product, visit https://www.lollipop.camera/ website. It is quite affordable, and working pretty well.
The camera itself has a very good picture quality in night-vision or daylight. It comes with a mobile app to configure and use it.
For fun and integration, I was looking for reverse engineering, and integrate it into my existing home automation setup (OpenHAB).
RTSP Flow
First good news: the camera supports and provides a direct RTSP flow! It is however not communicated officially. I discovered it by observing network traffic with Wireshark.
Only remark is that the address of the channel is not the same for all cameras, and has a variable part in the path:
Good news – it was easy to reverse and understand how to get this URL part!
When the camera is associated with an account during the setup phase – it gets associated a unique identifier. If you unregister and re-pair your camera, this ID will change. The number in the path is a simple MD5 hash of this pairing ID.
To compute the MD5 hash, one can use the following command under a Unix-like system:
echo -n '<id>' | md5sum
How to obtain this ID ? 2 solutions.
First solution, use the cloud API and retrieve the list of devices associated with your account.
Second solution, use the MQTT embedded broker (see next paragraph).
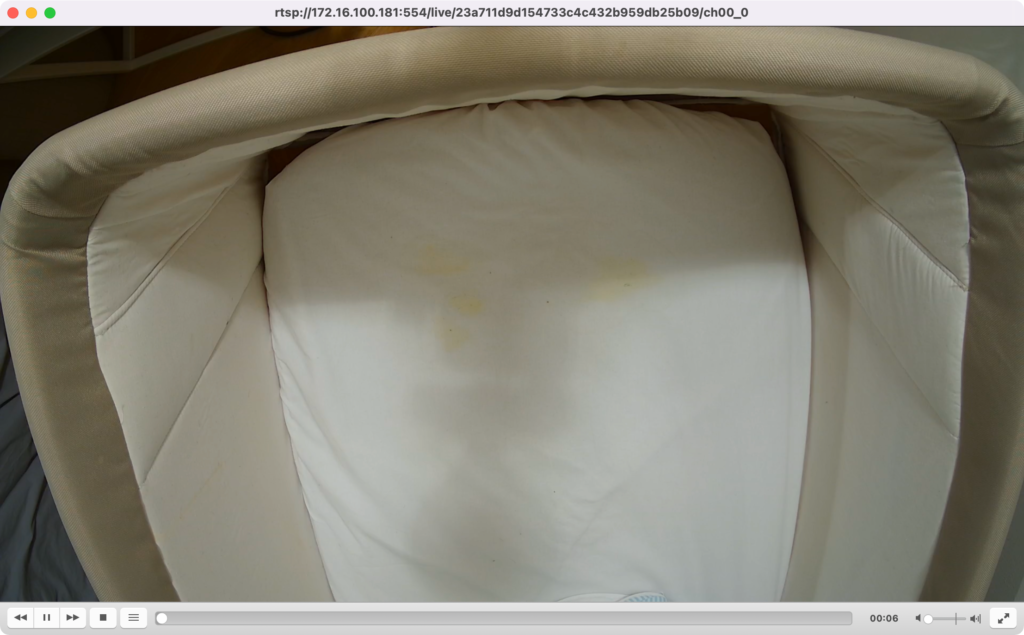
Once you get this unique ID, just get the MD5 hash of it and use your favorite tool such as VLC to access the video live feed:
The video itself is standard h264 encoded, full HD (1080p) and 30fps. It also has audio (AAC).
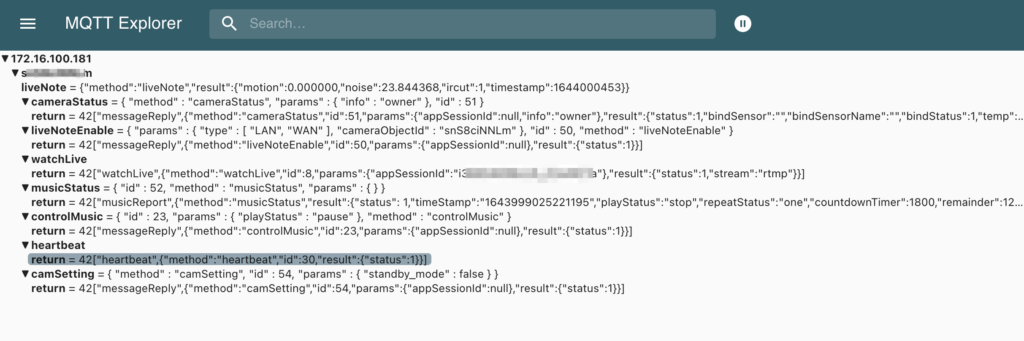
MQTT Broker
The camera hosts an MQTT broker on typical 1883 TCP port. One remark here – it is using TLS on the 1883 port – but without any authentication (I therefore wonder the goal of using TLS if no authentication is required…).
To connect to the broker and observe the trafic, you can either use a tool such as MQTT Explorer or mosquitto_sub in CLI. Mosquitto is slightly more complex as it forces you to provide a certificate authority for TLS – even if you don’t care about validating the certificate (use of –insecure).
I recommend, if you want to go with Mosquitto, to use stunnel to remove TLS layer:
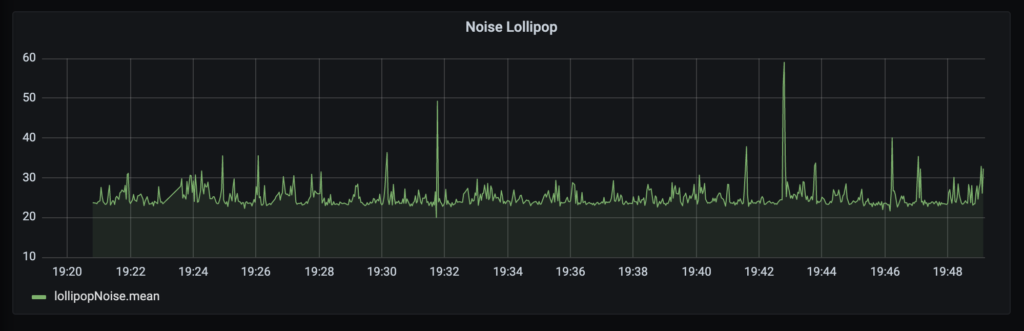
event_type: 3: noisy environment. with this event type, val is the noise level in DB.
General thoughts
I liked the fact that the camera is relatively opened, allowing the integration in existing installation. However, it is kind of insecure: getting IP connectivity to the camera, no password nor credential is required to access the video (including sound), nor control the camera through the MQTT broker.
As such, my recommendation would remain as usual: do not expose them to the internet, and if possible put all your IoT devices on a separate VLAN / SSID, with relatively strong isolation with your main network/VLAN/SSID.
Following my objective of increasing home FTTH bandwith by removing ISP set-top-box, I needed to change the VLAN priority of the DHCP packets (priority 6).
In previous articles, I patched the DHCP client of OpenWRT which uses raw sockets to use priority 6.
Now my objective is to use a standard router such as Mikrotik, which do not support the DHCP packet CoS by default.
I decided to use my Macchiatobin running a custom kernel and OpenWRT and configure it as a bridge which modifies the VLAN priority of specific packets.
This was actually easier than expected!
When creating a bridge, it is important to understand that we are operating at layer 2. A typical bridge is not inspecting packets at higher layers (3 and up), and as such not interacting at IP level.
There is however an option to change this behavior, and to force the processing of packets by the kernel at IP layer!
Just try the following command to enable the processing of bridge packets through iptables:
This change can be made persistent by altering sysctl configuration file in /etc/sysctl.d/.
net.bridge.bridge-nf-call-iptables=1
Now that the packets are being processed by iptables, the steps are the following:
Define VLAN interfaces
Create the bridge and attach interfaces
Create iptables rule to change the VLAN priority of selected packets
Defining VLAN interfaces
Why defining every VLAN, instead of just bridging interface as a trunk ? If you do that, the kernel will not have any knowledge about packets, and especially that 802.1Q is in use. And as VLAN priority is a feature that comes with 802.1Q – no VLAN = no priority !
Declare VLAN on the interfaces you wish to bridge, and specify the egress map, to indicate that packets with CoS set to 6 will be leaving the interface with a VLAN priority set to 6:
ip link add link eth0 name eth0.832 type vlan id 832
ip link set eth0.832 type vlan egress 6:6
ip link add link eth3 name eth3.832 type vlan id 832
ip link set eth3.832 type vlan egress 6:6
Create the bridge
Now, it is time to create the bridge and add the interfaces to it. Note that we don’t need to define an IP configuration for this interface (br0) as we just want the device to be a “passive” bridge.
Here we are! At this stage, the device is operating as a bridge, bridging vlan 832 and changing the priorty of DHCP packets to 6.
Persisting this configuration with OpenWRT
If you use OpenWRT and want to persist this configuration, here are the changes.
# /etc/config/network
config device
option type '8021q'
option ifname 'eth3'
option vid '832'
option name 'eth3.832'
option ipv6 '0'
list egress_qos_mapping '6:6'
list egress_qos_mapping '0:0'
list egress_qos_mapping '1:0'
list egress_qos_mapping '2:0'
list egress_qos_mapping '3:0'
list egress_qos_mapping '4:0'
list egress_qos_mapping '5:0'
config device
option type '8021q'
option ifname 'eth0'
option vid '832'
option name 'eth0.832'
option ipv6 '0'
list egress_qos_mapping '6:6'
list egress_qos_mapping '0:0'
list egress_qos_mapping '1:0'
list egress_qos_mapping '2:0'
list egress_qos_mapping '3:0'
list egress_qos_mapping '4:0'
list egress_qos_mapping '5:0'
config interface 'br0'
option type 'bridge'
option ifname 'eth3.832 eth0.832'
My French ISP (Orange) uses DHCP messages with a CoS Priority of 6, otherwise they are not processed. So in order to avoid using the set top box provided by him, you can use an OpenWRT router which comes with UDHCP (part of Busybox).
Here is a small patch to support this.
$(busybox)/networking/udhcp/dhcpc.c
In function udhcp_raw_socket(int ifindex), line 1086:
+ /* Set Kernel Priority to 6 */
+ int val = 6;
+ setsockopt(fd, SOL_SOCKET, SO_PRIORITY, &val, sizeof(val));
if (setsockopt_1(fd, SOL_PACKET, PACKET_AUXDATA) != 0) {
if (errno != ENOPROTOOPT)
log1s("can't set PACKET_AUXDATA on raw socket");
}
$(busybox)/networking/udhcp/packet.c
In function udhcp_send_raw_packet, line 123:
+ /* Set Kernel Priority to 6 */
+ int val = 6;
+ setsockopt(fd, SOL_SOCKET, SO_PRIORITY, &val, sizeof(val));
+ bb_info_msg("Packet priority set to %s", "6");
memset(&dest_sll, 0, sizeof(dest_sll));
memset(&packet, 0, offsetof(struct ip_udp_dhcp_packet, data));
packet.data = *dhcp_pkt; /* struct copy */
In function udhcp_send_kernel_packet, line 213:
+ /* Set Kernel Priority to 6 */
+ int val = 6;
+ setsockopt(fd, SOL_SOCKET, SO_PRIORITY, &val, sizeof(val));
/* If interface carrier goes down, unless we
* bind socket to a particular netdev, the packet
* can go out through another interface, eg. via
* default route despite being bound to a specific
* source IP. As such, bind to device hard and fail
* otherwise. Sending renewal packets on foreign
* interfaces makes no sense.
*/
if (ifname) {
This article will mainly target people located in France, but who knows 🙂
Orange, a French ISP, provides FTTH with up to 2GB downling/600mbps uplink, but the usage (and rental…) of their set top box (aka Livebox) is mandatory.
As I’m using my own router (Ubiquiti EdgeRouter), the Livebox is useless to me, just taking some place and energy :-). The goal of this article is to explain how to remove it to use a router instead.
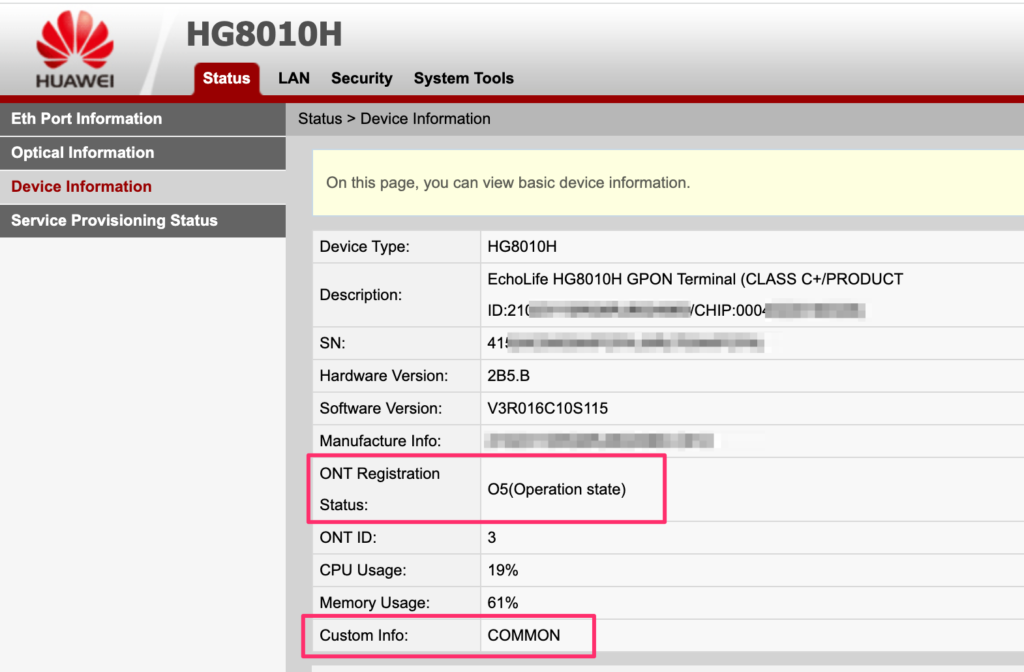
The Livebox 5 integrates an ONT. So in order to remove the LB5, I needed to find an external ONT. A friend gave me an “old” Huawei HG8010H, which is the one Orange used to provide with older Livebox versions.
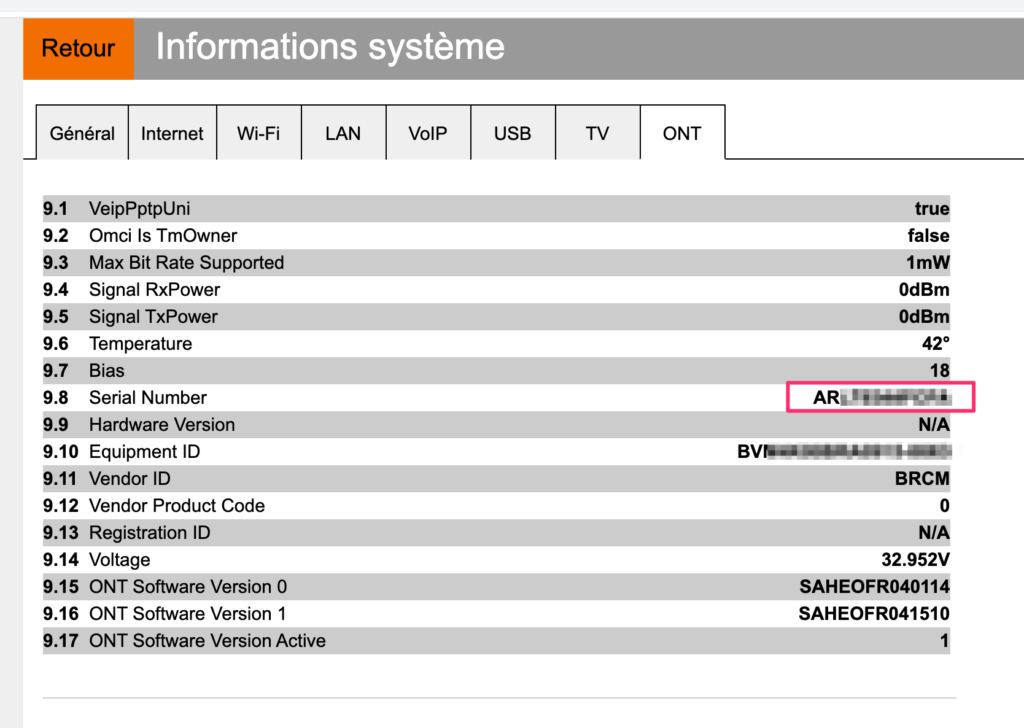
The first thing to do is to gate the ONT accepted on the optical network, commonly know as O5 state (“operation state” – https://www.mdpi.com/2076-3417/8/10/1934/pdf). To reach this state, the ONT must authenticate itself on the carrier network. Orange used to rely on the SLID (subscriber line ID), but this is no longer used. It now only relies on the serial number of the ONT. It means that is necessary to change the Serial Number of the new ONT by the allowed one (the Livebox). Getting the “allowed” SN is easy: just go on the Livebox administration page:
Getting the Serial Number of the ONT from Livebox 5
Setting the same SN in the new ONT is possible if the ONT is not in the ISP locked mode. I will not cover how to unlock an Orange-provided HG8010 ONT, this can be found on the web with keyboard “restorehwmode.sh” !
Once the Serial Number is changed on the ONT to simulate the Livebox, the fiber link should come up in O5 mode::
Now that the fiber link is up – the router must be configured to access.
Orange is using multiple VLANs (internet, TV, SIP…). I will just be covering the Internet access as I’m not using TV nor phone.
For Internet, the VLAN 832 should be used, using DHCP and the “option 90”, which is used to authenticate the subscriber.
The tricky detail is the following: DHCP packets should be sent with a VLAN priority set to 6 ! Without doing that, device won’t be able to authenticate to the network.
Before configuring the router, several things will be needed, such as the Mac Address of the Livebox and the authentication data. This can be calculated using a JavaScript tool, using the username & password provided by Orange (famous “fti/xxxx”). I chose a different option, which consists in gathering those information from the Livebox.
Feel free to use this simple Python script to obtain the information and generate the configuration for your EdgeRouter:
Last problem: the VLAN Priority 6. The router uses ISC-DHCP as DHCP client, which relies on raw sockets. As such, it bypasses the “egress policy” you could define on the router.
The only solution is to patch & recompile the ISC-DHCP to hardcode the VLAN priority.
Patching and re-compiling ISC-DHCP
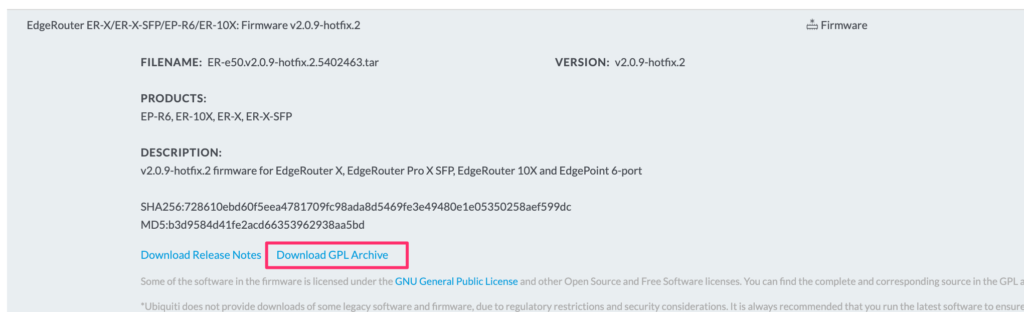
The easiest option is to use Docker! First of all, retrieve the package from Ubiquiti matching your router firmware version:
This archive includes all the package we need to recompile: edgeos-vyatta-dhcp.
Instanciate a Docker as follows:
docker run --rm -it debian:9.13 /bin/bash
Install necessary cross compilation toolchain:
apt-get update && apt-get install -y crossbuild-essential-mipsel vim
mkdir /data && cd /data
Copy the vyatta-dhcp3_4.1-ESV-R15-ubnt1+t5402460.dev.stretch.v2.0.9.24c30f9.tar.gz file to the /data in your docker:
For the version isc-dhclient-4.1-ESV-R15-P1, my patch file is:
--- a/common/discover.c
+++ b/common/discover.c
@@ -247,10 +247,6 @@ begin_iface_scan(struct iface_conf_list *ifaces) {
log_error("Error creating socket to list interfaces; %m");
return 0;
}
-
- /* Set Kernel Priority to 6 */
- int val = 6;
- setsockopt(ifaces->sock, SOL_SOCKET, SO_PRIORITY, &val, sizeof(val));
memset(&lifnum, 0, sizeof(lifnum));
#ifdef ISC_PLATFORM_HAVELIFNUM
diff --git a/common/icmp.c b/common/icmp.c
index ca857e0..6f97f67 100644
--- a/common/icmp.c
+++ b/common/icmp.c
@@ -95,10 +95,6 @@ void icmp_startup (routep, handler)
return;
}
- /* Set Kernel Priority to 6 */
- int val = 6;
- setsockopt(icmp_state -> socket, SOL_SOCKET, SO_PRIORITY, &val, sizeof(val));
-
#if defined (HAVE_SETFD)
if (fcntl (icmp_state -> socket, F_SETFD, 1) < 0)
log_error ("Can't set close-on-exec on icmp: %m");
diff --git a/common/lpf.c b/common/lpf.c
index 8111f38..fcf7db1 100644
--- a/common/lpf.c
+++ b/common/lpf.c
@@ -89,10 +89,6 @@ int if_register_lpf (info)
log_fatal ("Open a socket for LPF: %m");
}
- /* Set Kernel Priority to 6 */
- int val = 6;
- setsockopt(sock, SOL_SOCKET, SO_PRIORITY, &val, sizeof(val));
-
memset (&ifr, 0, sizeof ifr);
strncpy (ifr.ifr_name, (const char *)info -> ifp, sizeof ifr.ifr_name);
ifr.ifr_name[IFNAMSIZ-1] = '\0';
@@ -499,10 +495,6 @@ get_hw_addr(const char *name, struct hardware *hw) {
log_fatal("Can't create socket for \"%s\": %m", name);
}
- /* Set Kernel Priority to 6 */
- int val = 6;
- setsockopt(sock, SOL_SOCKET, SO_PRIORITY, &val, sizeof(val));
-
memset(&tmp, 0, sizeof(tmp));
strcpy(tmp.ifr_name, name);
if (ioctl(sock, SIOCGIFHWADDR, &tmp) < 0) {
diff --git a/common/raw.c b/common/raw.c
index b588f1b..a15f8ee 100644
--- a/common/raw.c
+++ b/common/raw.c
@@ -66,10 +66,6 @@ void if_register_send (info)
if ((sock = socket (AF_INET, SOCK_RAW, IPPROTO_RAW)) < 0)
log_fatal ("Can't create dhcp socket: %m");
- /* Set Kernel Priority to 6 */
- int val = 6;
- setsockopt(sock, SOL_SOCKET, SO_PRIORITY, &val, sizeof(val));
-
/* Set the BROADCAST option so that we can broadcast DHCP responses. */
flag = 1;
if (setsockopt (sock, SOL_SOCKET, SO_BROADCAST,
diff --git a/common/socket.c b/common/socket.c
index 8f94a63..3fe3d09 100644
--- a/common/socket.c
+++ b/common/socket.c
@@ -189,10 +189,6 @@ if_register_socket(struct interface_info *info, int family,
log_fatal("Can't create dhcp socket: %m");
}
- /* Set Kernel Priority to 6 */
- int val = 6;
- setsockopt(sock, SOL_SOCKET, SO_PRIORITY, &val, sizeof(val));
-
/* Set the REUSEADDR option so that we don't fail to start if
we're being restarted. */
flag = 1;
@@ -1178,10 +1174,6 @@ get_hw_addr(const char *name, struct hardware *hw) {
}
flag_check:
- /* Set Kernel Priority to 6 */
- int val = 6;
- setsockopt(sock, SOL_SOCKET, SO_PRIORITY, &val, sizeof(val));
-
if (lifr.lifr_flags & (IFF_VIRTUAL|IFF_IPMP)) {
hw->hlen = sizeof (hw->hbuf);
srandom((long)gethrtime());
Finally, recompile DHCLIENT.
cd /data/edgeos-vyatta-dhcp
make -f debian/rules configure
CC=mipsel-linux-gnu-gcc CPP=mipsel-linux-gnu-cpp ./configure --host=mipsel-linux-gnu --cache-file=config.cache
make
Here we are ! We now have a root access to the device – which is a good start. But what we were looking at – and our main motivation – is to access to all the sensors/probes/actuators values (in my case – for OpenHAB integration).
Having a root access, I started examining running processes, scripts, applications. The software bundle consists of a common bus – DBus – and multiple services communicating through the bus, all coded in LUA (compiled LUA). The LUA engine is a LUAJIT 2.0.
We will explore 2 different angles to interact with the Cozytouch data.
Option 1 – Interacting with the DBUS
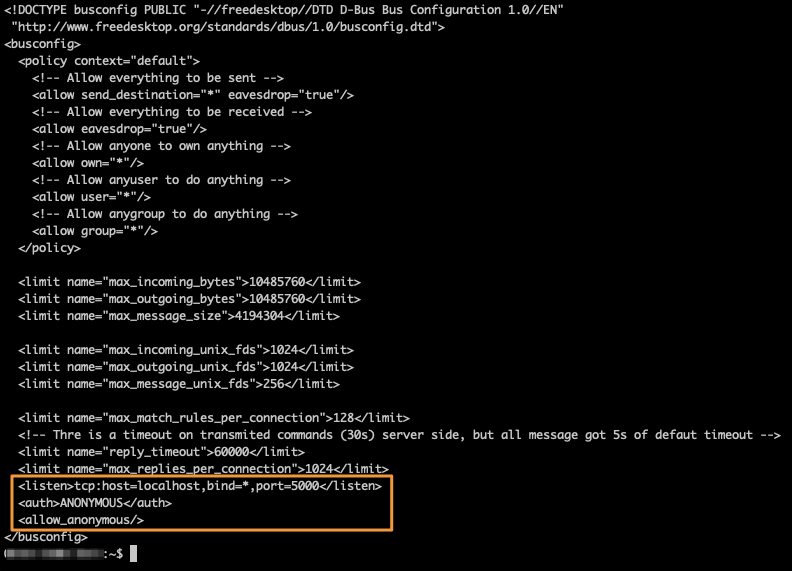
The first thing is to enable the remote access to the bus, using TCP. By default, this is deactivated – for security reasons.
Warning: by doing this, you will introduce a security vulnerability to the CozyTouch as it will expose the DBUS System Bus without authentication. In my case, it is not a problem – the CozyTouch being isolated in my Home Automation airgapped VLAN.
To enable DBUS over TCP, just alter the existing DBUS configuration:
/etc/dbus-1/system-local.conf
DBUS TCP configuration
Don’t forget that / is mounted as read-only by default. To alter any files, you’ll need to remount the / filesystem with read-write options:
$ mount -o remount,rw /
Now that you have access to the System DBUS, the first thing to do is listing of DBUS services:
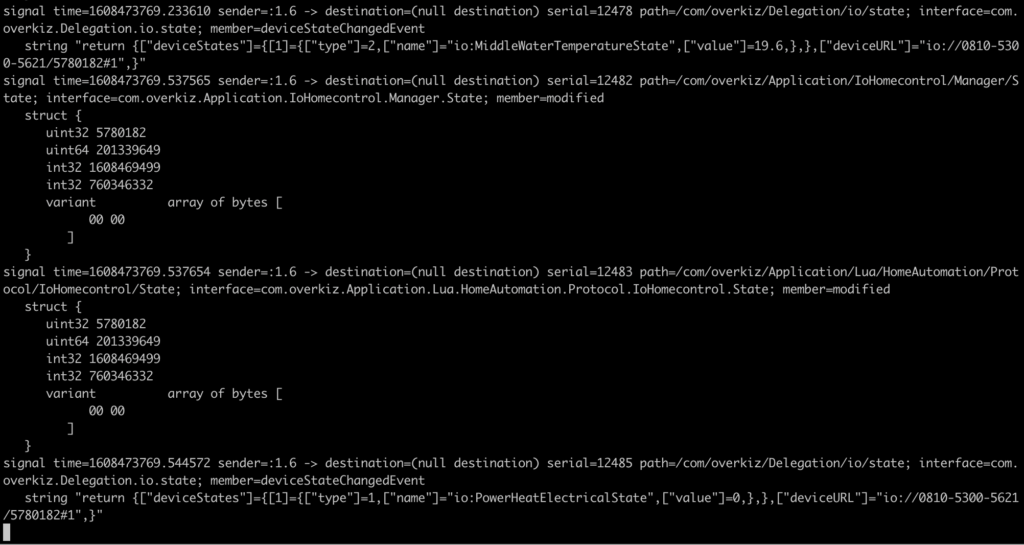
Periodically, the Bridge receives information (assuming that you have paired some devices with it through the mobile app).
DBus Listening/sniffing
Information is not encrypted – just coded. Reversing the coding will just require some extra reverse-engineering – and more widely – observation.
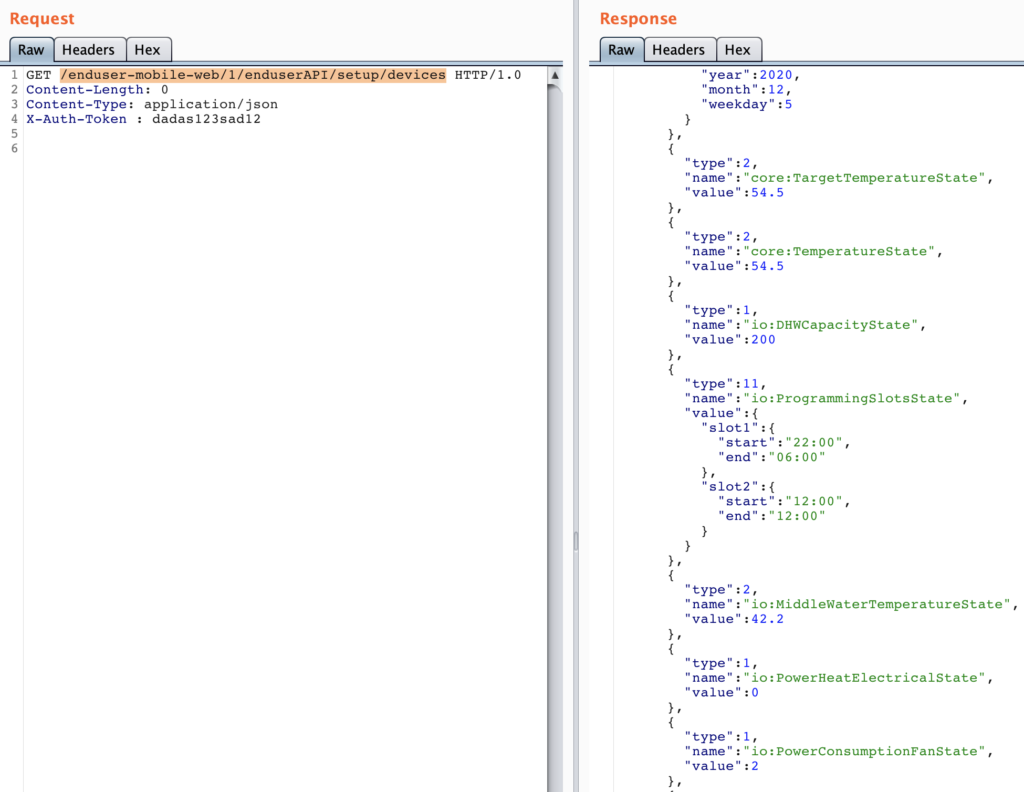
I chose using simple Python program/script to interact with the DBUS remotely. I will detail later the sensors/actuators capabilities – but keep in mind they only apply to my device (Atlantic AquaCozy).
Option 2 – Enabling the REST API
Having explored the device and reverse-engineering the Compiled LUA code – I figured out that the vendor has coded a REST API – but which is disabled by default. Sad.
The REST API is served by a webserver (lighttpd), which communicates with a LUA daemon over a unix file socket.
Step1: disable un-necessary lighttpd configuration (SSL). To achieve this, just rename /etc/lighttpd.d/ssl.conf to ssl.conf.disabled for example. Why ? Because SSL config needs a certificate & key which are not included, and disabling SSL is quicker than generating a keypair & cert!
Disabling SSL for lighttpd
Step2: starting lighttd:
$ /etc/init.d/lighttpd start
Step3: starting the LUA API Service
$ /usr/bin/luajit /apps/overkiz/local/bin/locald
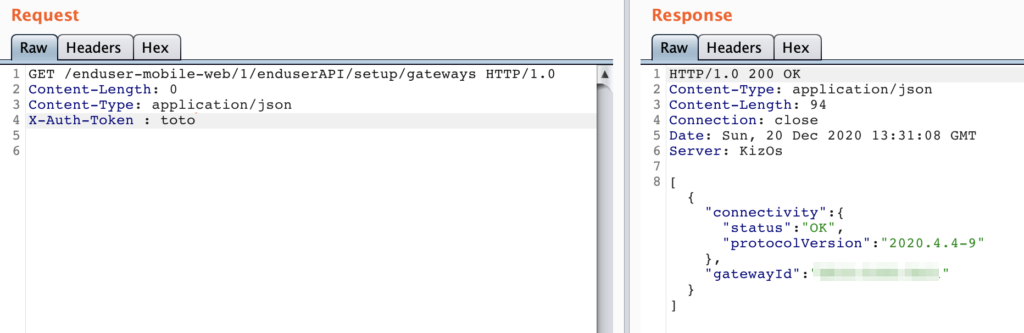
At this stage, the API is up and running and is accessible at http://<bridge ip>/enduser-mobile-web
Problems:
we don’t have API documentation
after few calls, you’ll realize that the API requires authentication (OAuth…)
Regarding the API documentation: decompile the LUA. Multiple LUA decompiles are available on Github. The resulting LUA is not perfect, but provides basics to be able to interact with the API.
Example of decompiled LUA – providing REST API information
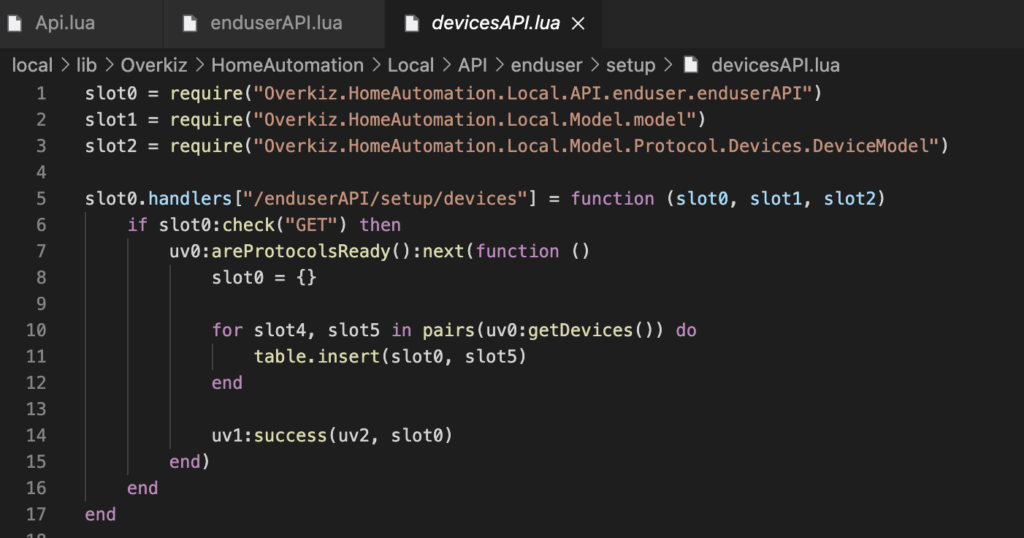
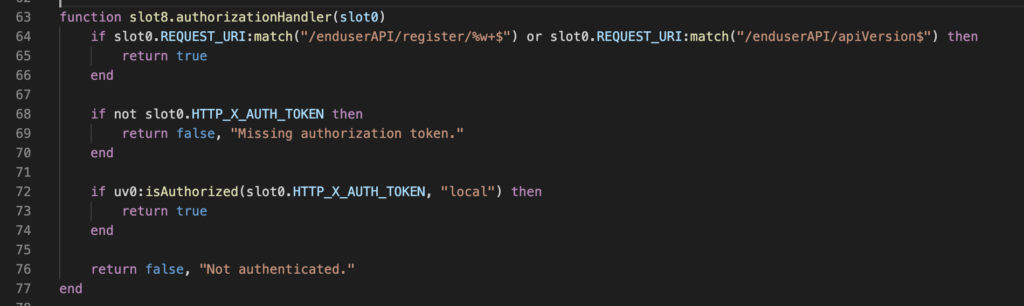
Now – the authentication part. More embarrassing, the code responsible of this is enduserAPI.lua:
Quickest and simple option, always return true to simulate a successful authentication. Problem: the LUA decompiled is not perfect and cannot be recompiled, it can just be used for reverse-engineering. Our option is patching the compiled LUA (hopefully – no code signature in place).
Reading a bit of LUA specifications (here or here for example), we learn that in LUA, the bool values are different from other languages:
0 means nil (null, not set)
1 means false
2 means true
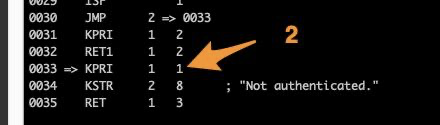
Our function ends with instruction “RET 1 3”, which means returning the value which resides in “slot 1”. The slot 1 value is set 2 lines before, “KPRI 1 1”, which means value 1 (FALSE) is put in “slot 1”. What we just need to do is to replace this instruction by “KPRI 1 2”, in disassembly line 0033.
Unfortunately, once again, we cannot just alter the assembly code and re-assemble it. Not supported by LUAJIT. We will has such using an hex editor, and replace the value.
No miracle method to do that: multiple attempts to edit the files, and locate the right place, being assisted by LUA specs/docs. Fortunately, the LUA file is also small – which helps. You can also assist yourself with STRINGS (“not authenticated” for example, which are stored at the end of the function).
After patching the enduserAPI.lua, the daemon can be restarted, and the API used:
NB: you still need to provide the “X-Auth-Token” header, but the value is not checked.
The vendor was so kind to leave SSH installed on the build – DropBear – which is a common SSH daemon for embedded systems. We just need to enable it. If we look at runlevel 5 – SSH is disabled, and can easily be enabled, by simply renaming /etc/rc5.d/K06dropbear to /etc/rc5.d/S30dropbear.
No firewall port needs to be opened (simple NMAP test returns "port closed", and not "port filtered").
Last detail: there is no root password set! And a password (or a key) is necessary to login. Easier option: just alter /etc/shadow and replace:
Where $1$U5C8/RRe$jOaAuy.0o9R.eZOgHHYnI1 is Linux MD5 password hash for password “toor”.
Now, umount the partition properly:
And dump the UBI root partition:
We know have a patched ROOT partition – and we need to flash-it back to the device. Because OpenOCD is not friendly – and it is always good to know multiple tools / options, we will use a different [advanced] technique to flash the Cozytouch, using a JLink probe.
Connect to the SoC using JLink
Start JLink:
root@raspberrypi4:~# /opt/JLink_Linux_V680_arm/JLinkExe
SEGGER J-Link Commander V6.80 (Compiled May 25 2020 17:09:50)
DLL version V6.80, compiled May 25 2020 17:09:30
Connecting to J-Link via USB...O.K.
Firmware: J-Link Pro V4 compiled Apr 16 2020 17:18:17
Hardware version: V4.00
S/N: 174402560
License(s): RDI, FlashBP, FlashDL, JFlash, GDB
IP-Addr: DHCP (no addr. received yet)
VTref=3.337V
Type "connect" to establish a target connection, '?' for help
J-Link>
The next step is to configure properly your interface:
Set the mode to JTAG:
J-Link>si 0
Selecting JTAG as current target interface.
Set the interface speed in adaptive mode (you can force a speed, but adaptative worked well)
J-Link>speed adaptive
Selecting adaptive clocking as target interface speed
Select the device type (SoC):
J-Link>device AT91SAM9G25
And finally, let the probe automatically detect the JTAG position
J-Link>JTAGConf -1,-1
Now that you are done with probe/tools configuration, let’s start the fun. Reset the device.
J-Link>r
Target connection not established yet but required for command.
Device "AT91SAM9G25" selected.
Connecting to target via JTAG
TotalIRLen = 4, IRPrint = 0x01
JTAG chain detection found 1 devices:
#0 Id: 0x0792603F, IRLen: 04, ARM926EJ-S Core
CP15.0.0: 0x41069265: ARM, Architecture 5TEJ
CP15.0.1: 0x1D152152: ICache: 16kB (4*128*32), DCache: 16kB (4*128*32)
Cache type: Separate, Write-back, Format C (WT supported)
ARM9 identified.
Reset delay: 0 ms
Reset type NORMAL: Using RESET pin, halting CPU after Reset
CP15.0.0: 0x41069265: ARM, Architecture 5TEJ
CP15.0.1: 0x1D152152: ICache: 16kB (4*128*32), DCache: 16kB (4*128*32)
Cache type: Separate, Write-back, Format C (WT supported)
J-Link>
The Cozytouch is now instrumentable through JTag, with instruction pointer at address 0x00000000, and in halted state.
Understand the AT91 boot Sequence
From JLink, you can’t directly flash the NAND. NAND are not directly addressed in the CPU address space and need some drivers (as explained earlier when dumping).
It is mandatory to understand the AT91 boot sequence before moving forward.
From Texas Instrument Documentation
According to the documentation, the AT91SAM9G25 comes with SAM-BA, a boot-rom program. I managed to boot in SAM-BA mode, instrumenting and hijacking the boot sequence, but SAM-BA is not able to deal with NAND flash. It requires additional drivers which are not directly addressable with SAM-BA.
We want to boot to a well-known tool – U-Boot. It allows to manipulate the device, including dumping/flashing NAND. We cannot directly boot in U-Boot and must follow the vendor boot sequence. We will have to find & compile the AT91BootStrap & U-Boot.
As mentioned in the doc, the goal of the ROM code is to load the bootstrap from the 64k internal memory of the chip. We don’t need a complex bootstrap: we just want it to load NAND flash drivers, and pass it to the next stage (U-Boot).
As we don’t want to brick the device, we’ll not flash the NAND with our bootstrap and uboot, but just hijack the boot, copying it in live memory (RAM) with JTAG probe.
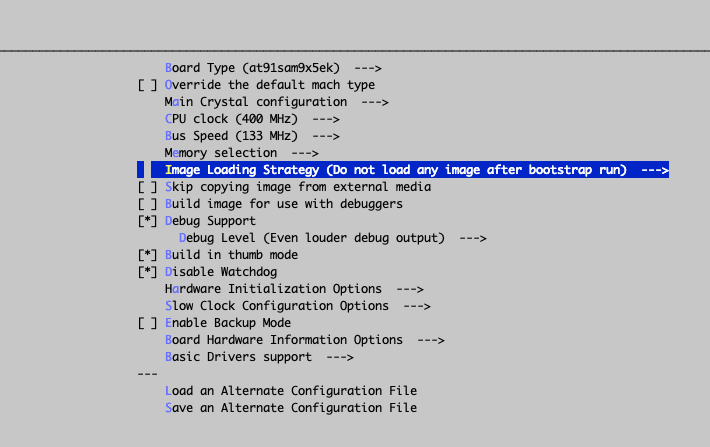
That being done, enter in the configuration options for the bootstrap:
make menuconfig
This will let you configure your perfect bootstrap. For me, the perfect bootstrap does… NOTHING: Image loading strategy -> do not load any image after bootstrap run.
Remember: the goal is not to take this board and run your own linux on it, but just to jailbreak it. At this stage, I’m just trying to figure how it works, and how is it made of.
AT91BootStrap Configuration Menu
Once compiled, I obtained the following files:
We must now load this bootstrap. Easy.
First, we set a breackpoint at @0: As written in the documentation, once the ROM Code execution is done, it will execute the bootstrap which will be remapped at address 0. We will then set a breakpoint before executing the Bootstrap, write in the RAM the boostrap, then execute it:
J-Link>setbp 0 A
Breakpoint set @ addr 0x00000001 (Handle = 0)
J-Link>g
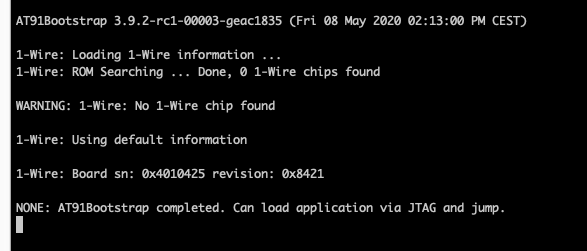
If you have the serial console plugged, you’ll see that the ROMCode as successfullly been executed:
ROM Code execution trace
The execution is now stopped at address 0, and the code at address 0 is the bootstrap provided by the Cozytouch vendor. Let’s overwrite it by our freshly compiled bootstrap:
Your AT91 SoC is now in a waiting state, with most drivers initialized, ready to move to second stage boot loading (Uboot).
Let’s copy the UBOOT executable code in the RAM – somewhere in the free memory (read the SoC documentation about RAM organization). Then, redirect the execution pointer at this address, and continue execution:
J-Link>loadbin /data/cozytouch/files/u-boot.bin 0x26f00000
Halting CPU for downloading file.
Downloading file [/data/cozytouch/files/u-boot.bin]...
O.K.
J-Link>setpc 0x26f00000
J-Link>g
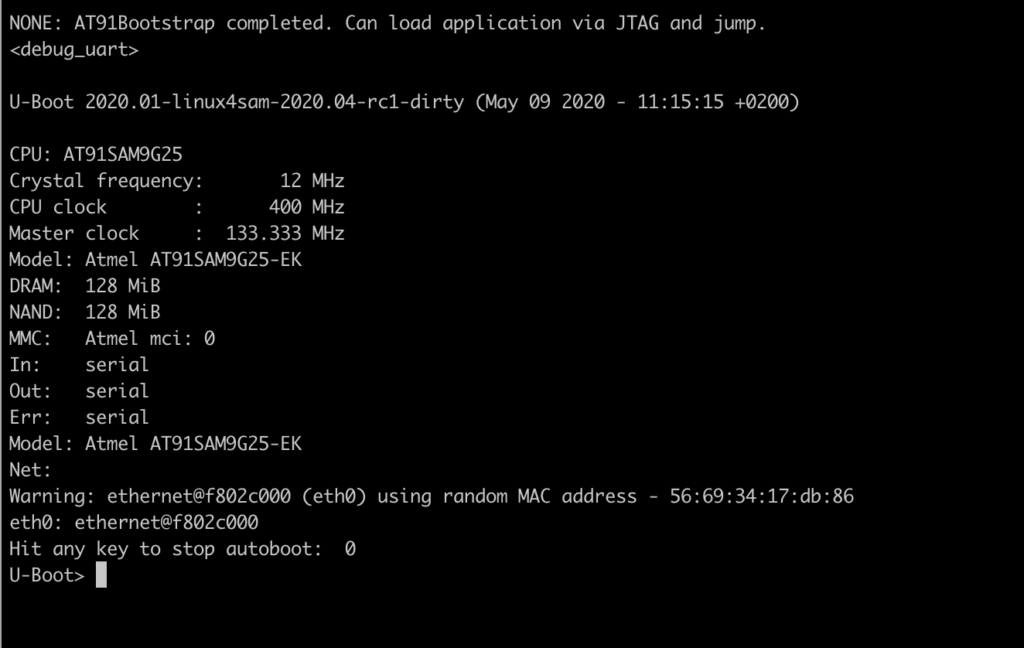
U-Boot loading
Welcome to U-Boot!
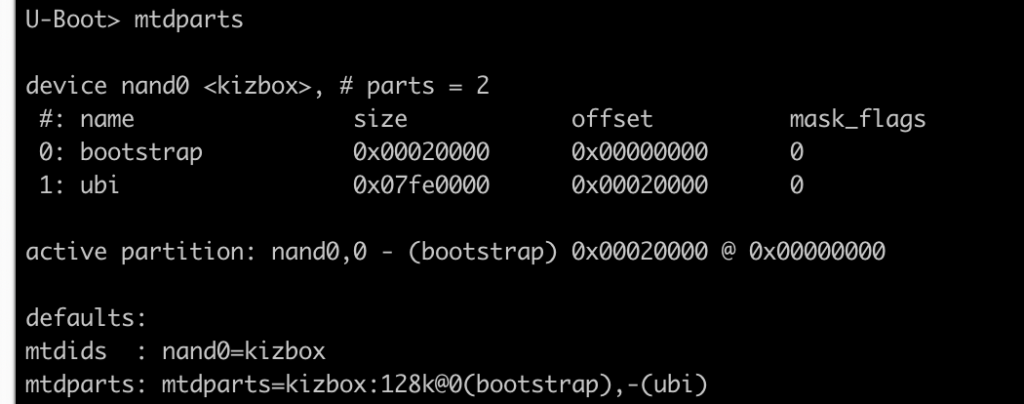
To confirm all our previous assumptions – we can for example list partitions:
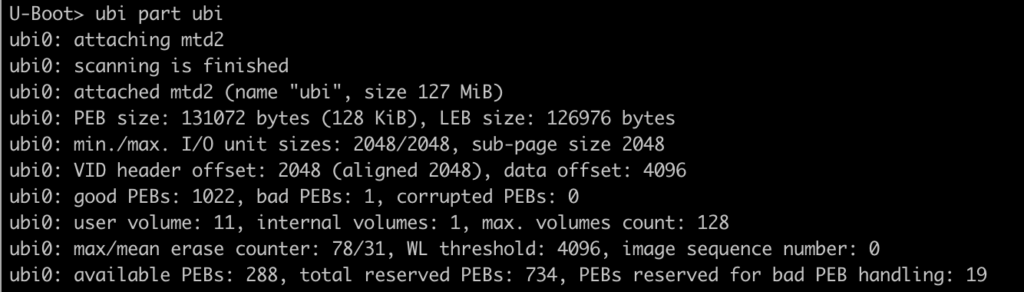
Now mount the 2nd partition as UBI:
And finally, you can list all UBI partitions to confirm partition scheme discovered from the dump.
Flash the patched ROOT partition
Now that we have a working U-Boot and patched the ROOT partition, we want to flash it to the NAND, and check that we correctly rooted our device.
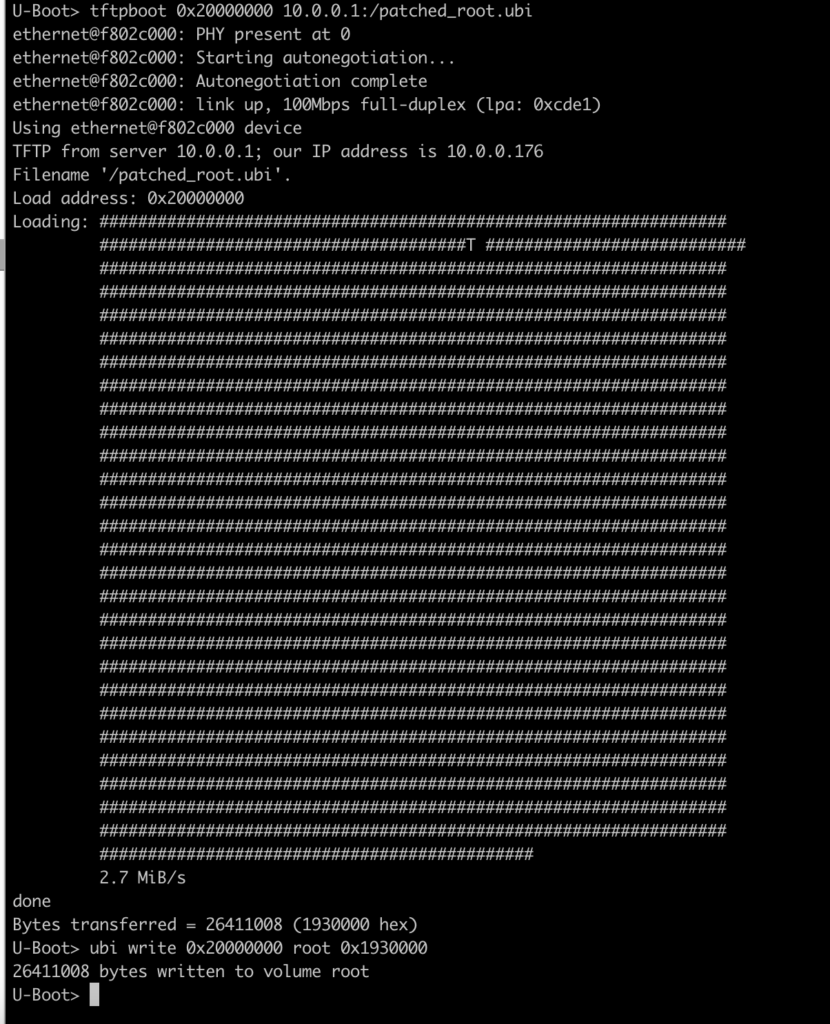
Install a TFTP daemon on your machine, as it will make your life easier to flash the Cozytouch with Uboot.
Once you have copied your file on the TFTP, load the new UBIFS for ROOT partition into memory:
Reboot the device (dont forget you have a breakpoint set with JLink! So if you don’t remove the BP nor hit “g”, the device won’t boot and wait for ages at PC 0x0).
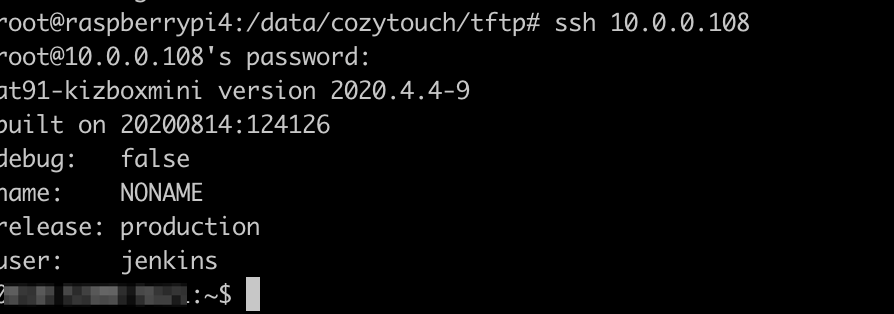
After couple of seconds – I assume you know how to find your Cozytouch on your LAN… And you can try SSH on it as root:
Login as root on the Cozytouch
Congratulations! You are now logged in as root on your Cozytouch !
After couple of days – I realized that the device was unrooted and SSH was not accessible anymore. I believe that the device has a watchdog routine, comparing the fingerprint/hash of the partition/firmware with an expected one. At the time of writing this article – I have not yet sorted out this “problem”.